
Veerkrachtig en Ontspannen wandelen: Struis – Mens – Robot
Ongeveer een half jaar geleden was ik bij het Internet op zoek naar artikelen over efficiënt wandelen en kwam ik in De Ingenieur een artikel tegen “Struisvogelpoot laat robots zuiniger rennen en staan”, een interview met de onderzoeksleider van het project BirdBot, waarin diverse aspecten van het efficiënte lopen van de struisvogel zijn onderzocht en zijn geïmiteerd met een fysiek model.
(Eenvoudigheidshalve zal ik in het vervolg van mijn verhaal de poot van de struisvogel aanduiden met been, net als bij de mens. En struisvogel met de afkorting struis.)
Belangrijke aspecten van het been van de struis zijn:
- Energie-efficiëntie van de biomechanische opzet van het been van de struis.
- Razendsnelle overgang tussen de stapfase/zwaaifase en de standfase van de loopcyclus per been, zonder extra waarneming en aandrijving voor de standfase die bij bestaande robots veel gewicht en energiebehoefte in het been vergt.
Het onderzoeksproject is eigenlijk gericht op de ontwikkeling van een loopsysteem voor een 2-benige robot, dat geïnspireerd is door het loopsysteem van vogels en in het bijzonder dat van de struis. Zelf heb ik belangstelling voor een vergelijking tussen het loopsysteem van de struis en de mens, met het oog op eventuele efficiëntieverhoging van het wandelpatroon “Veerkrachtig en ontspannen wandelen”. Daarbij is het duidelijk dat de ontwikkeling van een robot veel vrijheid biedt, terwijl men bij het wandelpatroon van de mens dient uit te gaan van de aangeboren lichaamsstructuur van de mens. Wel is het zo dat de mens veel creatieve mogelijkheden heeft om die lichaamsstructuur te gebruiken; denk maar aan sport en dansen.
In het artikel van de Ingenieur wordt verwezen naar een uitvoerig verslag van het onderzoeksproject BirdBot in Science Robotics. Zie:
https://www.science.org/doi/10.1126/scirobotics.abg4055#F2
Om het rapport geheel te kunnen lezen, is waarschijnlijk minstens een ID van de AAAS, American Association for the Advancement of Science, nodig. Dat is eenvoudig te verkrijgen door een e-mailadres en een wachtwoord op te geven.
De overzichtsvideo aan het begin van het artikel heeft moeite met afspelen. In plaats daarvan kan men een uitstekende video met dezelfde strekking bekijken. Zie:
https://www.youtube.com/watch?v=PXXdaqseHis
Het artikel heb ik bestudeerd en ook allerlei andere informatie die inzicht geeft in de struis en diens bestaan. Het vervolg van mijn verhaal begint met enige relevante hoofdzaken over de struis, gaat verder met de focus van het onderzoeksproject BirdBot en gaat tenslotte over in een vergelijking tussen struis, onderzoeksmodel BirdBot en de mens. Daarbij geef ik enkele conclusies voor het wandelpatroon “Veerkrachtig en ontspannen wandelen”.
Hoofdzaken over de struis
Er zijn 2 soorten dieren die op 2 benen lopen, de vogels en de mensen. De struis is de grootste vogel en tevens de grootste loopvogel, waarbij het laatste aangeeft dat de struis niet kan vliegen. De zuidelijke Afrikaanse struis is de grootste, de man gemiddeld 2,40 en de vrouw gemiddeld 1,90 meter.
Het lopen van de struis is bijzonder vanwege de maximale snelheid van 70 kilometer per uur en het grote uithoudingsvermogen, bijvoorbeeld een half uur lang 50 kilometer per uur. Bij die prestaties heeft de struis een relatief lage energiebehoefte. Tijdens het rennen heeft de struis bovendien weinig last van oneffenheden en obstakels.
De natuurlijke omgeving van de zuidelijke Afrikaanse struis is de savanne, bijvoorbeeld in de Kalahari Woestijn. De gekoppelde documentaire Ostrich the Flightless Bird geeft een goed inzicht in het lopen en het bestaan van de struis in diens natuurlijke omgeving.
Zie:
https://www.youtube.com/watch?v=GK1ll8e017k
Voor een inzicht in de bijzonderheden van het loopsysteem van de struis is een vergelijking van het lichaam van de struis met dat van de mens zinvol. Hieronder staat een plaatje uit een verhaal van de wetenschapper Nina Galler in “Science in School” dat een aantal hoofdzaken weergeeft:
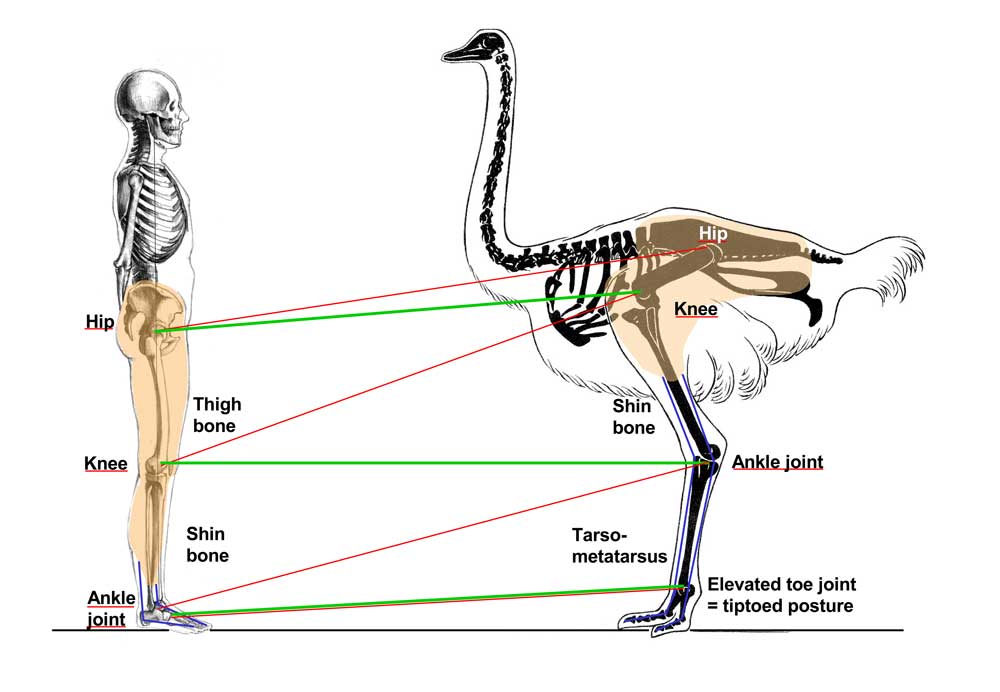
Gezien de verhouding tussen struis en mens lijkt de struis van het plaatje een vrouw te zijn.
Het ingekleurde deel van de lichamen geeft aan waar de spieren voor de voortbeweging zich bevinden, bij de struis hoger dan bij de mens. Hoewel, bij de mens loopt het in feite iets hoger door, omdat de sterke heup-lendenspier vastzit aan de onderste ruggenwervels.
De lengte van het been van de struis, inclusief de voet, is veel groter dan bij de mens. Dat komt vooral door de vorm van de voet. De struis heeft net als andere vogels een functionele en een anatomische voet. De functionele voet van de struis bestaat uit 2 tenen: de derde teen zowel bij wandelen en rennen; de vierde alleen voor de balans, vooral bij zacht lopen. (Vogels hebben gewoonlijk 4 tenen, de struis mist teen 1 en 2).
Boven de functionele voet en de onder enkel bevindt zich een lang bot, de tarsometatarsus, waarvan men aanneemt dat die is geëvolueerd uit middenvoetsbeentjes en voetwortelbeentjes van de anatomische voet. Evenals bij mensen buigt het enkelgewricht naar voren. Uit de tekening blijkt duidelijk dat het been wel heel lang is als tenen, tarsometatarsus, onderbeen en bovenbeen ongeveer in elkaars verlengde liggen. Dit leidt tot een staplengte van circa 500 centimeter bij hard rennen inclusief de sprong met beide benen van de grond, bij de mens is dat aanzienlijk lager (bij wandelen zonder sprong gemiddeld 60 centimeter, bij hardlopen op de 10 kilometer vermoedelijk ongeveer 200 centimeter, maar dat is een topprestatie).
Daarnaast is de stapfrequentie tamelijk hoog.
Zie voor meer toelichting:
https://www.scienceinschool.org/article/2011/ostrich/
Deze lichamelijke kenmerken van de struis zijn wel te imiteren met een robot, maar de mens zal moeten lopen met de eigen lichaamsstructuur.
Een verdere bijzonderheid van de tarsometatarsus is de flexibiliteit van de gewrichten aan beide uiteinden, waardoor dit bot verticaal kan staan, maar ook in een opgevouwen zigzagpatroon horizontaal onder het onderbeen/scheenbeen op de grond kan liggen, terwijl de tenen verticaal in de grond staan. Uit die opgevouwen ligging kan de struis met beide benen tegelijk weer opstaan; alweer een bijzondere prestatie bij een gewicht van 100 tot 150 kilo.
Evenals andere vogels loopt de struis met een voorvoetlanding, namelijk op de grote derde teen, waar nodig bijgestaan door de kleine vierde teen, De functionele voet heeft geen hiel, het gewricht met de tarsometatarsus bevindt zich boven de grond.
De focus van het project BirdBot.
Het project beperkt zich tot de biomechanica van het been van de struis, met aanzienlijke vereenvoudigingen. Het model is praktisch geheel 2-dimensionaal, behoudens de interactie tussen de 2 benen. De beweging van een been bestaat alleen uit voorwaarts-achterwaarts en waar nodig naar boven en beneden. De verbindingen tussen de delen van het been bestaan uit eenvoudige scharnieren.
Er worden geen sensoren, informatieverwerking, elektronische besturing en aandrijving bij elk gewricht gebruikt. De heupgewrichten bevinden zich op een starre horizontale as. Er is voor het gehele been een aandrijving van de heen en weer gaande heupbeweging plus een extra aandrijving voor de buiging van de knie.
De relatieve maatvoering van de onderdelen van het been is conform die van de struis. Tevens zijn de hoeken van de onderlinge beweging van de delen in het geval van lopen overgenomen.
De beweging wordt gerealiseerd met een systeem van 4 elektromotoren plus gedimensioneerde kabels, katrollen en diverse soorten veren. Beweging door de motoren wordt geladen in de veren ten einde de daarop volgende tegenbeweging te ondersteunen.
In het rapport van het project zijn foto’s, mooie tekeningen en een video opgenomen die de voorbereiding, het ontwerp en het gerealiseerde model gedetailleerd weergeven.
Onderstaande foto uit het rapport geeft een globaal inzicht in de werking van het model met behulp van een groot, sterk vereenvoudigd, hand- en voetmatig bediend model:
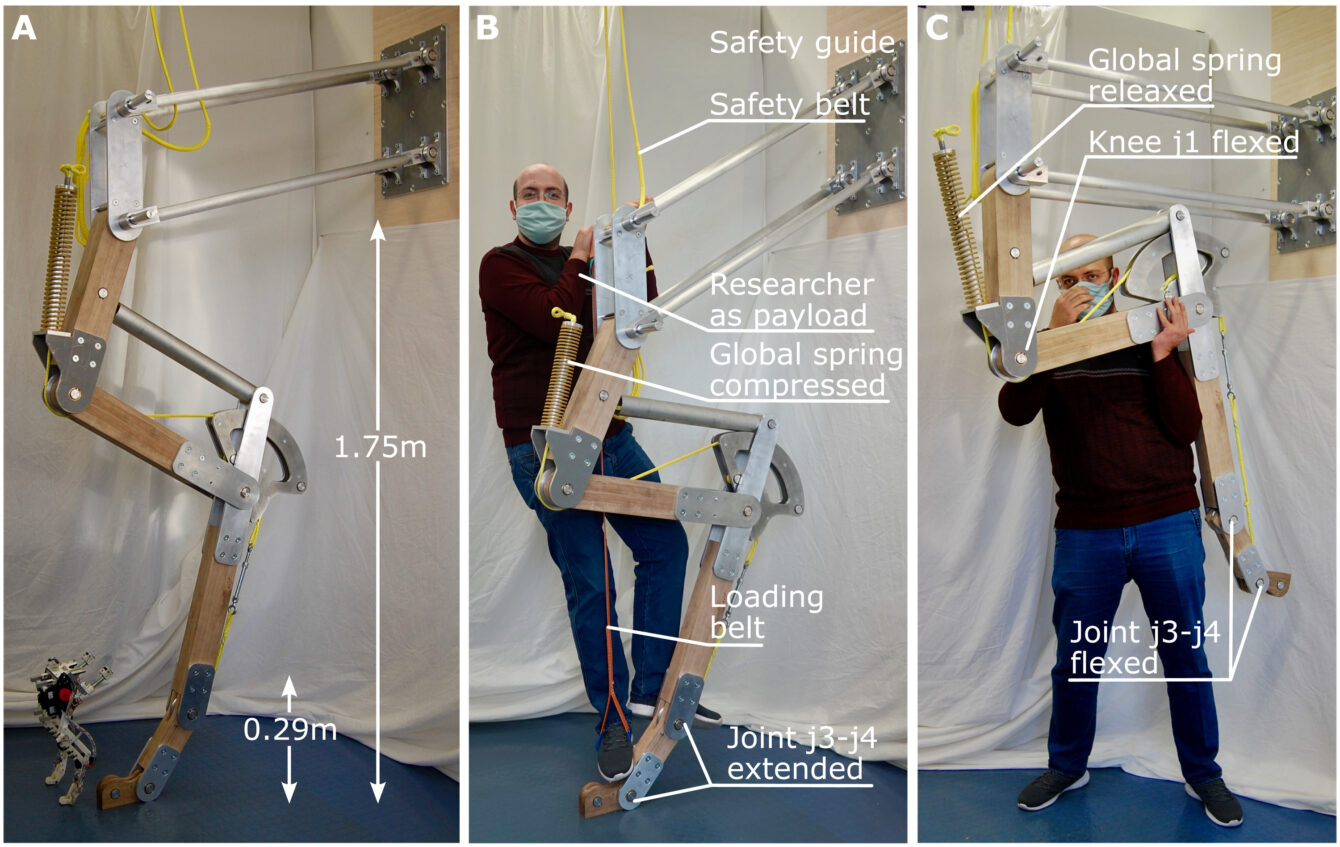
Toelichting:
A
Links van voet van het grote model dat overeenkomt met de lengte van de struis, staat het eigenlijke kleine model dat is gerealiseerd.
De voet heeft contact met de grond, maar er drukt nog geen gewicht op het been. Daardoor is de globale pees veer ofwel GTS linksboven nog ontspannen.
B
Het been in de standfase draagt het gewicht van een mens, die met een riem aan de heupgewrichtsas hangt. Daardoor wordt de GTS zichtbaar gespannen, geladen met energie voor een tegenbeweging.
C
Aan het eind van de standfase wordt de knie zodanig gebogen dat het het been omhoog beweegt, terwijl de uitvering van de GTS deze beweging ondersteunt. Die uitvering ontstaat door de achterwaartse buiging van de teen.
Bij de niet weergegeven beweging van de heupaandrijving in voorwaartse richting kom het been weer in de positie A.
De bovengenoemde overzichtsvideo van het project BirdBot bevat een animatie van 2 hoofdbewegingen van de loopcyclus van BirdBot, gevolgd door een aantal herhalingen van de gehele loopcyclus op de lopende band, links een getekende animatie, rechts een opname van de fysieke BirdBot.
De belangrijkste motor voor de loopcyclus is de heupaandrijving. Die zorgt voor een voortdurende slingerbeweging van het bovenbeen, achterwaarts en voorwaarts.
De cyclus begint in de video met de landing in de standfase. Zodra de voet bij contact met de grond een inschakelingsstand bereikt, wordt de lengte van een lange kabel, de Global Tendon (de algemene “pees”) beperkt, waardoor de verschillende delen van het been en de voet onderling gekoppeld worden. Dat bewerkstelligt dat de belangrijkste veer, de Global Tendon Spring (GTS) gespannen wordt tijdens de standfase, omdat het been daarbij rechtop wordt gezet en de voet het gewicht van beide benen draagt: de directe afstand tussen voet en heup wordt langer.
Zodra de voet een uitschakelingsstand bereikt, gaat de standfase over in de stapfase/zwaaifase. Daarbij wordt de lengte van de Global Tendon vrijgegeven, wat zorgt voor ontkoppeling van de onderdelen van het been. Dan ontspant de GTS duidelijk waarneembaar, wat een opwaartse kracht aan het been geeft. De heupaandrijving beweegt het bovenbeen in deze fase voorwaarts. Tevens zwaait het been naar boven en naar voren met behulp van de specifieke extra aandrijving van de knie. En bij dat alles komt dat het gewicht van de BirdBot in de stapfase gedragen wordt door het andere been.
Het einde van de aandrijving van de heup en de knie plus de zwaartekracht zorgen voor een daling van het been naar het contact met de grond.
Volgende cyclus, enzovoorts.
De projectgroep acht het onderzoek qua doelstelling geslaagd. De energie-efficiëntie is in relatie tot de functionaliteit van het been aanzienlijk hoger dan bij de voortbeweging van soortgelijke robots waarbij uitgebreid gebruik wordt gemaakt van sensoren, informatiesystemen en motoren.
Vergelijking struis – mens – robot
De ongetrainde struisvogel is een uitstekende lange-afstand hardloper. Een half uur lang 50 kilometer per uur is voor de struis een gewone prestatie. De mens is in verhouding tot vergelijkbare dieren ook een uitstekende lange-afstand hardloper, maar loopt aanzienlijk minder hard dan de struis. Een kampioen hardloper op de 10 km haalt die afstand in ongeveer een half uur, met een snelheid van gemiddeld 20 kilometer per uur. Een kampioen ultrahardloper haalt soms 240 kilometer in 24 uur.
De snelst vergelijkbare hardloper is het jachtluipaard met 110 kilometer per uur, maar dat houdt het dier niet langer dan een minuut vol; met een afgelegde afstand van ruim 2,5 kilometer. Vervolgens moet het jachtluipaard afhaken om uit te rusten.
De BirdBot is geen volwaardige loper, alleen een model van de benen van de struis. Die benen zijn ontwikkeld voor langzaam en iets harder lopen; in het onderzoeksrapport 2,7 kilometer per uur; voor een lopend model van 29 centimeter hoog is die 2,7 kilometer toch nog een aardige prestatie.
Hoe is het beeld van de energie-efficiëntie bij het lopen van struis, mens en BirdBot. Een belangrijk uitgangspunt van verschillende wetenschappen zoals antropologie en biologie is dat lopen op 2 benen in plaats van op 4 benen op zich al energiezuiniger is. Dat geldt dus duidelijk voor struis, mens en BirdBot.
Empirisch onderzoek heeft bewezen: de efficiëntie van de mens is goed, die van de struis is beter. In het project BirdBot blijkt dat de efficiëntie van BirdBot goed is in vergelijking met vergelijkbare functies van andere looprobots.
Zie voor een oorsprong van de energie-efficiëntie van de mens de onderstaande publicatie van de Nederlandse New Scientist:
https://www.newscientist.nl/nieuws/prehistorische-mutatie-maakte-de-mens-tot-ultieme-langeafstandsloper/#:~:text=Het%20verlies%20van%20%C3%A9%C3%A9n%20enkel,muizen%20aan%20een%20trainingsregime%20onderwierpen.
Volgens dit artikel scoort de mens goed vanwege deze aangeboren kenmerken: lange, veerkrachtige benen, grote voeten, sterke bilspieren en het verbeterde zweetklierensysteem zodat mensen warmte veel gemakkelijker kwijt kunnen dan andere zoogdieren.
Zelf vind ik bij nadere bestudering dat de loopcyclus van de struis en de loopcyclus van de mens met het wandelpatroon “Veerkrachtig en Ontspannen wandelen” sterk op elkaar lijken. Vanwege de geslaagde imitatie lijkt de loopcyclus van BirdBot ook sterk op die van de struis en mens, wat daardoor een goede score oplevert ten opzichte van andere looprobots.
Bij mijn studie heb ik ook veel kunnen leren van een onderzoeksrapport “Adaptations for economical bipedal running: the effect of limb structure on three-dimensional joint mechanics΅ uit 2010. Centraal staat daarin een uitvoerige vergelijking van de energie-efficiëntie van struis en mens.
De menselijke proefpersonen van het onderzoek hebben de hiellanding toegepast, wat grote invloed heeft op de uitkomsten. Daarom heb ik naar beste vermogen de uitkomsten geïnterpreteerd naar veronderstelde uitkomsten bij “Veerkrachtig en ontspannen wandelen”, waarvan voorvoetlanding deel uitmaakt.
Zie voor het gehele rapport:
https://pmc.ncbi.nlm.nih.gov/articles/PMC3061092/#ack1
Na ruime overweging heb ik vastgesteld dat ik geen betere samenvatting van het rapport kan maken dan die aan het begin van het rapport van de onderzoekers (vertaald uit het Engels, met enkele kleine aanpassingen):
“We stelden de hypothese op dat de bijna 50 procent lagere energiekosten van hardlopen bij struisvogels (ten opzichte van de mens) het resultaat zijn van: (i) mechanische kracht van de onderste ledematen, (ii) grotere opslag en afgifte van elastische energie in de standfase, en (iii) lagere totale spierkracht.
Om deze hypothesen te testen, gebruikten we driedimensionale mechanische metingen van gewrichten en een eenvoudig model om de elastische en spierbijdragen aan gewrichtsarbeid en -kracht te schatten.
(Hiertoe zijn metingen verricht bij een aantal mensen en struisvogels, met een loopsnelheid van ongeveer 11,5 kilometer per uur; volgens de website van Nike beschouwen experts voor mensen 11 kilometer als de grens tussen joggen en hardlopen)
In tegenstelling tot onze eerste hypothese ontdekten we dat struisvogels en mensen dezelfde hoeveelheid mechanische kracht genereren om de ledematen met een vergelijkbare zelfgekozen loopsnelheid te zwaaien (voet te verplaatsen), wat aangeeft dat ledemaatzwaai waarschijnlijk niet bijdraagt aan het verschil in energiekosten van hardlopen tussen deze soorten, (de struisvogel en de mens).
Daarentegen schatten we dat struisvogels 120 procent meer mechanische gewrichtskracht in de standfase genereren via afgifte van elastische energie, in vergelijking met mensen. Deze elastische mechanische kracht treedt bijna uitsluitend op bij het TMP (tarsometatarsale-phalangeale) gewricht, wat een verschuiving van mechanische krachtopwekking naar distale (verder van de romp gelegen) gewrichten aantoont, in vergelijking met mensen.
We schatten ook dat de positieve spiervezelkracht 35 procent lager is bij struisvogels vergeleken met mensen, en dat dit voornamelijk te danken is aan een hogere capaciteit voor opslag en vrijgave van elastische energie.”
Hieronder volg ik puntsgewijs verschillende details van de loopcyclus van struis, mens en BirdBot, te beginnen bij het contact bij de landing van de voet:
De vorm van de functionele voeten van struis en mens verschilt aanmerkelijk. De functionele voet van de struis heeft een veel eenvoudiger structuur dan die van de mens: 2 tenen in plaats van 5 en geen middenvoetsbeentjes, voetwortelbeentjes en een enkel. Zoals ik boven reeds vermeldde, landt de de struis met de voorvoet. Het neerzetten van de voet van de struis gebeurt met een duidelijke volgorde van de kleinste naar de grootste teenkootjes van de grote teen, waardoor het gewicht van de struis geleidelijk bij de landing overgedragen wordt. Dit is een aangeboren beweging. De grote teen en daardoor de voet heeft een sterke veerkracht door een sterke pees die afkomstig is van de kuitspier. Onder de voet bevinden zich dikke vetkussens die voor demping zorgen. En er is geen functionele hiel, maar er zijn 2 gewrichten tussen tarsometatarsus en grote teen 3 en kleine teen 4, samen het TMP (tarsometatarsale-phalangeale) gewricht, in onderstaande tekening per abuis MTP genoemd. De Romeinse cijfers geven de kootjes van de tenen aan.
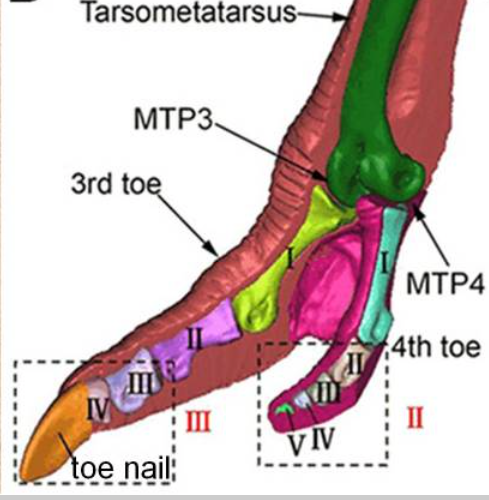
Bron: Phalangeal joints kinematics during ostrich (Struthio camelus) locomotion
De voet van de mens is buitengewoon complex. Deze heeft een koepelstructuur met 2 lengtebogen en 2 dwarsbogen en allerlei veerkracht.
Het neerzetten van de voet van de mens is niet aangeboren, maar ontwikkelt zich vooral in de eerste levensjaren, maar daarna ook nog wel. Als de mens met de voorvoet landt zijn er allerlei varianten mogelijk, bijvoorbeeld een volgorde: tenen, bal van de voet, buitenkant van de voet, achtervoet tot de gehele voet staat. Of direct bal van de voet, buitenkant van de voet. En nog meer. Die varianten zijn mogelijk, maar niet aangeboren, soms cultureel bepaald. Onder de voet bevinden zich meer of minder dikke vetkussens, afhankelijk van de mate waarin de demping is overgenomen door schoenen met bijbehorende degeneratie van de vetkussens.
In de BirdBot is een imitatie van de grote teen van de struis verwerkt, die redelijk functioneert. De kleine teen doet niet mee, aangezien BirdBot niet zijdelings kan bewegen, terwijl zijdelingse balans nu juist het doel van de kleine teen is.
Gezien de resultaten bij het lopen in het hierboven geciteerde onderzoeksrapport lijkt de functionele voet van de struis veel doelmatiger dan de voet van de mens. Ik veronderstel echter dat het verschil minder groot kan zijn als de mens optimaal landt met de voorvoet.
Bij de voortgang van het standbeen speelt relativiteit een rol. Men kan de heup beschouwen als het draaipunt van een slinger waarbij de voet ten opzichte van de heup achterwaarts beweegt, door de aandrijving van de grote bilspier of men kan de voet beschouwen als het draaipunt van een omgekeerde slinger waarbij de heup ten opzichte van de voet voorwaarts beweegt, door de aandrijving van de wet van de traagheid. In beide gevallen grijpt de aandrijving aan op het niveau van de heup. De combinatie van de aandrijvingen zorgt voor de onderlinge beweging van heup en voet. Dit doet zich zowel bij struis als mens voor. En als imitatie ook bij de BirdBot.
Tijdens de standfase veren het been en de voet in, zowel bij de struis als de mens. Dit wordt verticaal bewerkstelligd door de zwaartekracht omdat het standbeen geleidelijk het gehele lichaam draagt.
Bij de struis wordt het horizontaal bewerkstelligd door invering van de voet die bij de struis achterwaarts, zelfs naar beneden buigt en invering van het been dat achterwaarts beweegt, terwijl het been tevens bij knie en enkel wordt gestrekt. Daarbij spelen de enorme kuitspieren een belangrijke rol
Bij het hardlopen van de mens wordt het horizontaal bewerkstelligd door been en voet achterwaarts en vrijwel recht te trekken, bij wandelen van de mens door alleen het been achterwaarts en vrijwel recht te trekken.
De BirdBot geeft een redelijke imitatie van de struis. Een belangrijke afwijking is dat BirdBot de voet nogal schuin naar voren neerzet, terwijl struis en met de voorvoet landende mens dat doen met een nogal steile hoek. Een video-analyse van Haile Gebrselassie, tweemaal olympisch kampioen en negenmaal wereldkampioen hardlopen, geeft aan dat hij met de voorvoet landt bij een hoek van ongeveer 85 booggraden. De struis steekt zijn functionele voet bij de zwaai wel ver vooruit, maar landt met praktisch dezelfde hoek. Bij hardlopers gaat de zwaai vergezeld van een sprong met beide benen van de grond.
Tijdens het begin van de stapfase/zwaaifase wordt het bovenbeen naar voren gebracht. Bij de mens met de heup-lendenspier, bij de struis vermoedelijk ook. Tevens veren bij de struis de kuitspieren uit voor extra buiging van de tarsometatarsus en de tenen, wat de struis een aanzienlijk voordeel biedt bij hardlopen. Bij de landing kan de tarsometatarsus bij het anatomische hielgewricht naar voren/boven buigen, terwijl het functioneel analoge onderbeen van de mens dan alleen maar bij de knie kan strekken.
Om een voorstelling te krijgen van de verdeling van de opwekking en het gebruik van elastische energie – invering en uitvering – over de metingen bij de gewrichten heb ik gegevens uit het onderzoeksrapport “Adaptations for economical bipedal running: the effect of limb structure on three-dimensional joint mechanics΅ geanalyseerd en geïnterpreteerd:
In onderstaande tabel hebben de TMP van de struis en de enkel van de mens dezelfde functie en zijn daarom vergelijkbaar. De struis is altijd een voorvoetlander. De mens is in dit geval een hiellander.
| fase loopcyclus | struis | mens (hiellander) | mijn commentaar |
| invering = + | |||
| stand + | 53% TMP, 22,7% anatomische enkel, 18% knie, 7% heup, | 50% heup, 33% enkel, 18% knie | De struis landt op een bijzonder elastische voet. de mens landt met een gestrekt been, waarvan de elasticiteit in de heup komt. |
| zwaai + | 80% anatomische enkel, 14% heup, 5% knie, 1% TMP | 78% heup, 18% knie, 4% enkel | De enkel van de struis werkt voor de tarsometatarsus als de verbinding van een dorsvlegel. De heup van de mens slingert het gestrekte been naar voren. |
| uitvering = – | |||
| stand – | 64% TMP, 19% knie, 9% heup, 8% anatomische enkel | 47% enkel, 40% knie, 13% heup | De struis zet het lange been rechtop. De mens buigt de enkel en de knie bij het afrollen van de voet. |
| zwaai – | 78% knie, 15,2% heup, 7% enkel, 0,3% TMP | 89% knie, 10% heup, 1% enkel | De struis trekt de knie sterk omhoog. De mens strekt de knie. |
Zoals in het onderzoeksrapport wordt vermeld, gaat het bij energie-efficiëntie niet zozeer om minder arbeid met elastische energie als om vervanging van arbeid met spieren door arbeid met elastische energie. Tegen die achtergrond kan men eventuele verbetering van de efficiëntie van het lopen van de mens beoordelen.
Hoewel het landen op de voorvoet bij hardlopen duidelijk verschilt van wandelen vanwege inspanning en de sprong bij elke stap, zijn er toch veel overeenkomsten met Veerkrachtig en ontspannen wandelen. In enkele fragmenten van de gekoppelde video van de Hinke Schokker, een Nederlands kampioen ultralopen, is duidelijk te zien hoe zij loopt (deze video werkt overigens niet altijd, afhankelijk van het apparaat of configuratie):
https://www.youtube.com/watch?v=wRFGLn8oqS0
Op basis van het overzicht en mijn eigen ervaring wijkt het beeld van de mens met de aanpak van Veerkrachtig en ontspannen wandelen op de volgende punten significant af van het beeld van de wandelaar met een hiellanding:
- Bij de standfase wordt de elasticiteit van de voet en de enkel veel sterker ingezet, te vergelijken met de struis. Weliswaar kan dat waarschijnlijk nog verder geoptimaliseerd worden dan de voorvoetlanding op zich en de minimalistische schoen. De voet is uiterst complex, waardoor de elastische werking bij onderdelen van de voet meer mogelijkheden kan bieden dan verwacht wordt.
- Bij de zwaaifase wordt de elasticiteit vooral ingezet bij de heup, zij het totaal anders dan voor de hiellanding. De heup- lendenspier veert in bij de voorwaartse beweging van bovenbeen plus heup en veert uit bij de achterwaartse beweging, de grote bilspier werkt juist omgekeerd.
- Er is niet zoiets als afrollen van de voet in de standfase van de hiellanding, waarbij het zwaartepunt van het lichaam over de voet wordt geduwd. De standfase van Veerkrachtig en ontspannen landen is elastisch gezien niet meer dan vooral de voet en een beetje ook de rest van het been laden met elastische energie en vervolgens ontladen. Ofwel op een sterke veer drukken en vervolgens ontspannen.
- Bij Veerkrachtig en ontspannen wandelen is er geen sprake van een “foot strike”, want de landing is uitermate zacht. De elasticiteit komt vooral door de zwaartekracht en de reactie op spierkracht. Bij wandelen met dit looppatroon wordt de voet belast met 1 maal het lichaamsgewicht, bij hardlopen is het meestal 2 tot 3 maal het lichaamsgewicht.
Tot besluit
Wat kan men bij het lopen van de mens bijvoorbeeld verbeteren, gezien de efficiëntie van de struis?
In de eerste plaats vergroting van de beschikbare veerkracht: meer invering en vervanging van spierkracht door uitvering in de standfase. Aangezien de menselijke voet relatief groot en evenals de functionele voet van de struis bijzonder elastisch is, ligt het voor de hand de volledige elasticiteit van de voet van de mens in te schakelen. Dat is mogelijk met een optimale voorvoetlanding.
In de tweede plaats kan men aan het einde van de standfase ook de invering van de knie en de hefboomwerking van de tenen op de peesplaat van de voet gebruiken.
In de derde plaats kan men experimenteren met de eigen mogelijkheden.
Zie voor de vorige afleveringen:
https://dse.nl/veerkrachtig-en-ontspannen-wandelen-tips-2/
Beste Jaap,
Wat een origineel onderzoek. En fris bovendien tussen alle verhalen over EindhovenLaag en BrainportHoog. Compliment.
Peer